Hello, Box2D!
这一篇,我会用 SDL 将 Box2D 官网上的示例程序给渲染出来。
值得一提的是,Box2D 中的 testbed 使用 OpenGL 来渲染图像,且使用 ImGUI 作为其 GUI 库,这对经典的组合让我感到无比的亲切(笑)。
再顺带一提,Box2D 的 JSON 解析库使用的是 sajson,它通过这个解析库保存 testbed 的菜单配置。
那么废话不多说了,接下来就开始尝试写出这个程序吧。
创建一个世界
前面一篇我们提到过,Box2D 使用自己实现的内存池来管理对象。这些对象的内存管理由 世界 (b2World) 来完成,世界是管理内存、对象和模拟的中心,所以我们无论干什么之前我们都需要先创建一个世界。
1 | |
世界便创建好了,接下来我们需要创建两个刚体,先是第一个作为地板的静态刚体。
创建一个静态刚体
1 | |
可以看到,最后一行中 b2World::CreateBody 方法便是一个工厂函数,我们在创建一个刚体对象前,需要先创建刚体的 定义,然后把 定义 传给工厂函数,工厂函数根据定义的信息来构建该对象。
这就很像我们去餐馆里点菜,服务员先记下我们点的所有菜,然后将该订单传给后厨,后厨根据这张订单烹饪出我们想要的菜肴。你肯定不能用别的方法来创建这些对象,就好像你肯定不会跑到别人餐馆里另起炉灶(笑)。
但这里的刚体还没有 形状 (b2Shape),我们需要用 夹具 (b2Fixture) 把形状给”夹”到刚体上去。
1 | |
你有可能想问,为什么形状不需要调用工厂函数来创建呢?因为形状只是我们构造夹具时所需要的信息而已,我们并不需要保存信息的引用,这就好像厨师只需要在烹饪的时候知道你想要什么便好(笑)。
但在这里我们稍微偷了个懒,我们并没有像刚才创建刚体对象的时候一样,先创建一个定义,再将定义传给工厂函数让其去构造,我们在这里是直接把 形状 和 密度 传给了工厂函数让其去构造夹具。但这并不重要,毕竟最后都是将构造夹具所需的信息传给了工厂函数。
按照定义来说,静态刚体的质量为零,我们将其密度设置为零便好,毕竟我们不需要知道一个不会发生碰撞的对象的质量。
如此,一个可以作为地板的静态刚体便出现在了 Box2D 的世界中,它长达 80m,高达 10m,因为传递给 b2PolygonShape::SetAsBox 方法的参数是矩形盒长宽的一半,
而且 Box2D 采用的是 MKS 单位制。
当这个刚体的位置改变或者角度旋转的时候,形状上的每一点也会跟着它移动或旋转,因为形状上的每一点都将该刚体的坐标当做原点。
这里有一个奇怪的问题,我们可以在模拟过程修改形状 相对于刚体 的位置和角度吗?这样是不行的,那些修改相当于形状发生了改变,而 Box2D 是一个模拟形状不会发生改变的物体的物理引擎。
接下来,让我们创建一个会动的刚体吧。
创建一个动态刚体
让我们先贴出这部分代码:
1 | |
由于刚体默认是静态的,所以我们在创建定义时需要手动设置为动态,也就是将 type 赋值为 b2_dynamicBody,这一步是必须的。
其次,由于我们想让刚体倾斜一定角度掉落在地面上,所以我们除了设置了位置以外,还设置了角度,由于 Box2D 使用的是 弧度制,所以我们用 b2_pi,也就是圆周率来设置好该角度。
最后调用工厂函数,一个动态刚体便创建完毕了,接下来像刚才一样创建形状并构造夹具即可,这里我们用夹具的定义来构造。
1 | |
为刚体构造这些夹具时,Box2D 会自动帮你算出刚体的质量,刚体中至少有一个夹具的密度不为零,否则你会看到一些很奇怪的效果。
接下来,让我们开始模拟这个物理世界并用 SDL 输出画面吧。
模拟世界
首先我们知道,一个游戏是一帧一帧运行起来的,所以 Box2D 这个物理引擎给我们提供了一个步进的方法,即 b2World::Step 方法,让我们来看看这个函数的原型:
1 | |
timeStep 很显然就是我们需要步进的时间;
velocityIterations 即 速度迭代次数;
positionIterations 即 位置迭代次数。
看到这里便能知道,Box2D 有一个算法会在 离散 的时间点上计算物理方程来完成模拟,我们称其为 积分器 (integrator),我们得告诉它我们需要步进的时间长短。由于一般的游戏都是 60 帧,所以在这里我们步进 1.0f / 60.0f 秒获得 60 帧的效果,当然你也可以设置更小的值,譬如 1.0f / 144.0f 秒。
Box2D 不希望这个步进的时间长短在模拟过程中发生改变,你有可能会想把实际帧率作为参数传进去,以防止游戏运行速率因为单帧计算量过大而变慢(游戏速率变慢的现象在红警等比较老的游戏中很常见),但这样会直接导致我们模拟的物理世界行为不确定。
这是因为实际帧率是不稳定的,程序运行时每次传入的步进时间参数也就不一样,所以在某些情况下程序模拟出来的效果可能每次都不一样。
除了积分器,Box2D 还有用于计算约束的 约束解算器 (constraint solver), 而后面两个参数就与它有关。抛开前面讲的关于约束的抽象概念,约束求解 的过程实际上就是修正两个刚体之间的关系。
譬如两个刚体在运动的时候重叠在了一起,约束解算器就会改变它俩的位置,减小它们的重叠面积;两个由关节连接在一起的刚体旋转时超过了关节的限制,约束解算器就会将刚体的角度修改到关节限制的角度内。
如果只是两个刚体的话,那么一次约束求解便可以很好地完成工作。可是当两个以上的刚体互相作用时,求解一对刚体的约束会对另一对刚体的约束产生轻微的影响,我们便需要多次迭代,于是乎出现了 迭代次数 的概念。
在这里请记住,不管迭代几次,我们都是在一帧(你给定的步进时间长度)内完成的这些操作。
约束求解的过程分为两步,便是我们上面提到的 速度迭代 和 位置迭代。首先,速度迭代 计算刚体所受的所有力,让刚体朝着正确的方向运动;其次,位置迭代 再负责减少刚体之间的重叠面积、限制关节的脱离。后者有可能提前退出如果那些差错本身就比较小的话。
官方推荐的迭代次数是速度迭代 8 次,位置迭代 3 次,这需要你自己去权衡一下质量和效率。说完这些,我们写下这些代码:
1 | |
这样,我们便成功地模拟了这个物理世界,接下来需要做的是输出这些画面。
输出画面
我们使用 SDL 来输出画面,可是这里出现了一个问题,SDL 以窗口左上角为原点,坐标轴长这样:
没错,只有 x, y 轴都为正的图像才会显示在屏幕里,而 Box2D 的坐标轴是这样的:
emmmm,他们的 y 轴方向不一样…而且在 Box2D 中对象是越接近原点越好,并不推荐像屏幕坐标那样只朝向一边。所以我们输出画面的时候需要做好处理,将 Box2D 中的坐标换算成屏幕上的坐标。
就这里而言,我们只需要先翻转一下 y 轴,再把长度单位换算为像素,弧度换算为角度就好啦~
1 | |
最后,以良好习惯做个收尾工作便好
1 | |
Box2D 会在世界对象离开作用域时自动释放,所以你大可不必操心它们,但以良好的习惯把指针赋值为 nullptr 并没有什么不好。
这是我这个程序的输出图像:
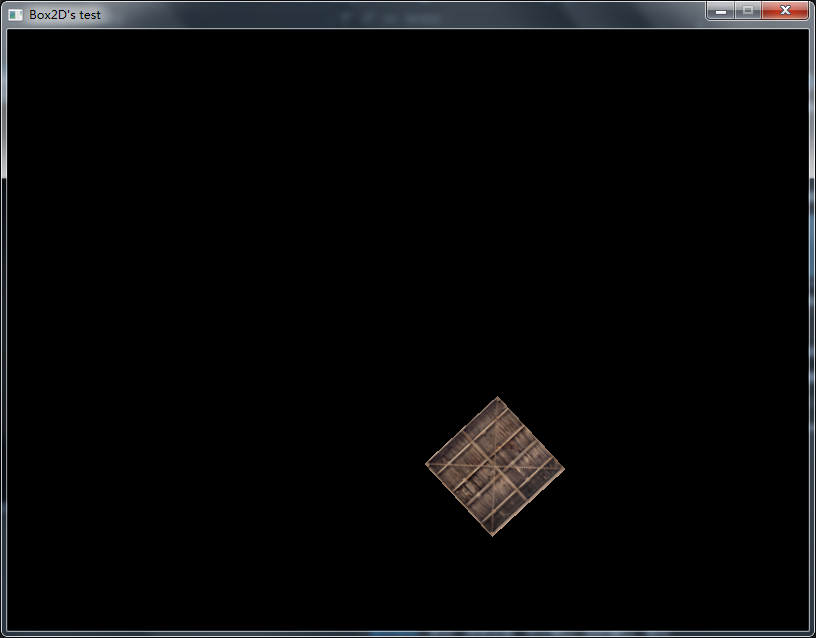
这里我喜闻乐见地使用了 LearnOpenGL 中的箱子朋友来承受地面的撞击。
所有的代码都放在了 这里,你可以尝试编译运行它们。
搞定这个程序后,就可以开始阅读 Box2D 的 testbed 的代码来学习了,祝你旅途愉快~